Lodní stabilizační gyroskopy jsou technologií vyvinutou v 19. století a na počátku 20. století a používanou ke stabilizaci klopných pohybů oceánských lodí. Jejich funkce je podobná funkci řídicích momentových gyroskopů nebo reakčních kol v kosmických lodích – zajišťují rotační stabilitu prostřednictvím produkce točivého momentu. V této aplikaci ztratily přízeň ve prospěch hydrodynamických ploutví stabilizátoru klopení z důvodu snížení nákladů a hmotnosti. Od 90. let 20. století se však obnovil zájem o zařízení pro stabilizaci náklonu plavidel při nízkých rychlostech (Seakeeper, Quick MC2 atd.). Na rozdíl od tradičních ploutví není gyroskop při vytváření momentu stabilizace náklonu závislý na dopředné rychlosti lodi, a proto může stabilizovat motorové jachty při kotvení. Nejnovější generace stabilizátorů s „nulovou rychlostí“ (CMC, Humphree atd.) však může stabilizovat jachty při kotvení díky své excentricitě vůči hřídeli.
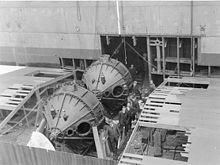
Transportní loď USS Henderson z první světové války, dokončená v roce 1917, byla první velkou lodí s gyroskopickými stabilizátory. Měla dva 25tunové setrvačníky o průměru 2,7 m (9 stop) namontované poblíž středu lodi, které byly roztáčeny střídavými motory o výkonu 56 kW (75 k) při 1100 otáčkách za minutu. Skříně gyroskopů byly uloženy na svislých ložiskách. Když malý senzorový gyroskop na můstku zaznamenal náklon, servomotor otáčel gyroskopy kolem svislé osy takovým směrem, aby jejich precese působila proti náklonu. Při testech dokázal tento systém snížit náklon na 3 stupně i na nejbouřlivějším moři.
Jednou z nejznámějších lodí, která poprvé použila gyroskop proti náklonu, byla italská osobní loď SS Conte di Savoia, která poprvé vyplula v listopadu 1932. Měla tři setrvačníky, které měly průměr 13 stop a vážily 108 tun.
Lodní gyroskopický stabilizátor obvykle funguje tak, že omezuje osu náklonu gyroskopu a umožňuje mu „předbíhat“ buď v ose náklonu, nebo odklonu. Umožnění precese při klopení lodi způsobuje, že jeho rotující rotor vytváří protichůdný moment stabilizující klopení k momentu vytvářenému vlnami na trupu lodi. Schopnost účinného působení závisí na řadě faktorů, mezi něž patří velikost, hmotnost a úhlový moment. Je také ovlivněna periodou náklonu lodi. Účinné instalace na lodích vyžadují rotory o hmotnosti přibližně 3 až 5 % výtlaku lodi.
Na rozdíl od hydrodynamických stabilizačních ploutví může lodní gyroskopický stabilizátor vytvářet pouze omezený moment stabilizace náklonu, který může být překročen s rostoucí výškou vln. V opačném případě výrobce nezřídka doporučuje, aby se jednotka na moři při velkých vlnách nepoužívala.