Les gyroscopes stabilisateurs de navires sont une technologie développée au 19e siècle et au début du 20e siècle et utilisée pour stabiliser les mouvements de roulis des navires océaniques. Leur fonction est similaire à celle des gyroscopes à moment de commande ou des roues de réaction dans les engins spatiaux – ils assurent la stabilité en rotation via la production d’un couple. Dans cette application, ils ont perdu la faveur des ailerons stabilisateurs de roulis hydrodynamiques en raison de leur coût et de leur poids réduits. Cependant, depuis les années 1990, on constate un regain d’intérêt pour ce dispositif pour la stabilisation en roulis à basse vitesse des navires (Seakeeper, Quick MC2, etc.). Contrairement aux ailerons traditionnels, le gyroscope ne dépend pas de la vitesse d’avancement du navire pour générer un moment de stabilisation du roulis et peut donc stabiliser les yachts à moteur au mouillage. Cependant, la dernière génération de stabilisateurs à ailettes « zéro vitesse » (CMC, Humphree, etc.) peut stabiliser les yachts au mouillage grâce à leur excentricité par rapport à l’arbre.
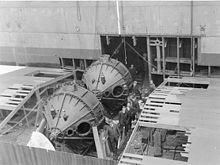
Le transport USS Henderson de la Première Guerre mondiale, achevé en 1917, a été le premier grand navire équipé de stabilisateurs gyroscopiques. Il avait deux volants d’inertie de 25 tonnes et de 9 pieds (2,7 m) de diamètre montés près du centre du navire, tournés à 1100 tr/min par des moteurs à courant alternatif de 75 ch (56 kW). Les boîtiers des gyroscopes étaient montés sur des paliers verticaux. Lorsqu’un petit gyroscope à capteur situé sur la passerelle détectait un roulis, un servomoteur faisait tourner les gyroscopes autour d’un axe vertical dans une direction telle que leur précession s’opposait au roulis. Lors de tests, ce système était capable de réduire le roulis à 3 degrés dans les mers les plus agitées.
L’un des navires les plus célèbres à avoir utilisé pour la première fois un gyroscope antiroulis était le paquebot italien SS Conte di Savoia, qui a navigué pour la première fois en novembre 1932. Il avait trois volants d’inertie de 13 pieds de diamètre et pesait 108 tonnes.
Le stabilisateur gyroscopique de navire fonctionne généralement en contraignant l’axe de roulis du gyroscope et en lui permettant de « précéder » soit dans l’axe de tangage, soit dans l’axe de lacet. En permettant au gyroscope de précéder lorsque le navire roule, son rotor en rotation génère un moment stabilisateur de roulis opposé à celui généré par les vagues sur la coque du navire. Sa capacité à le faire efficacement dépend d’une série de facteurs, dont sa taille, son poids et son moment angulaire. Elle est également affectée par la période de roulis du navire. Les installations efficaces des navires nécessitent des rotors ayant un poids d’environ 3 % à 5 % du déplacement d’un navire.
Contrairement aux ailettes hydrodynamiques de stabilisation du roulis, le stabilisateur gyroscopique du navire ne peut produire qu’un moment de stabilisation du roulis limité qui peut être dépassé lorsque la hauteur des vagues augmente. Sinon, il n’est pas rare que le fabricant recommande de ne pas utiliser l’appareil en mer dans de grandes vagues.