Żyroskopy stabilizujące na statkach to technologia opracowana w XIX wieku i na początku XX wieku, stosowana do stabilizacji ruchów przechyłowych na statkach oceanicznych. Ich funkcja jest podobna do żyroskopów momentu kontrolnego lub kół reakcyjnych w statkach kosmicznych – zapewniają stabilność obrotową poprzez wytwarzanie momentu obrotowego. Ze względu na niższy koszt i masę, w tym zastosowaniu straciły one na popularności na rzecz płetw hydrodynamicznych stabilizatorów przechyłów. Jednak od lat 90-tych XX wieku wzrosło zainteresowanie tym urządzeniem do stabilizacji przechyłów statków przy małych prędkościach (Seakeeper, Quick MC2, itp.). W przeciwieństwie do tradycyjnych płetw, żyroskop nie opiera się na prędkości statku do generowania momentu stabilizującego przechył i dlatego może stabilizować jachty motorowe na kotwicy. Jednakże, najnowsza generacja stabilizatorów płetw „zero speed” (CMC, Humphree, etc.) może stabilizować jachty podczas kotwiczenia dzięki ich mimośrodowości w stosunku do wału.
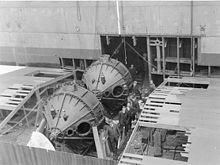
Ukończony w 1917 r. transportowiec USS Henderson z okresu I wojny światowej był pierwszym dużym statkiem wyposażonym w stabilizatory żyroskopowe. Posiadał on dwa 25-tonowe koła zamachowe o średnicy 2,7 m, zamontowane w pobliżu środka statku, obracające się z prędkością 1100 obr/min, napędzane silnikami prądu zmiennego o mocy 75 KM (56 kW). Obudowy żyroskopów zamontowane były na pionowych łożyskach. Kiedy mały czujnik żyroskopowy na mostku wyczuwał przechył, serwomotor obracał żyroskopy wokół pionowej osi w kierunku, w którym ich precesja przeciwdziałała przechyłowi. W testach system ten był w stanie zredukować przechył do 3 stopni na najbardziej wzburzonym morzu.
Jednym z najbardziej znanych statków, na którym po raz pierwszy zastosowano żyroskop przeciw przechyłowi był włoski liniowiec pasażerski SS Conte di Savoia, który po raz pierwszy wypłynął w listopadzie 1932 roku. Posiadał on trzy koła zamachowe o średnicy 13 stóp i wadze 108 ton.
Stabilizator żyroskopowy statku działa zazwyczaj poprzez ograniczenie osi przechyłu żyroskopu i umożliwienie mu „precesji” albo w osi skoku albo odchylenia. Zezwolenie na precesję podczas kołysania się statku powoduje, że jego wirujący wirnik generuje przeciwstawny moment stabilizujący przechył do tego generowanego przez fale na kadłubie statku. Jego zdolność do efektywnego działania w tym zakresie zależy od wielu czynników, takich jak rozmiar, masa i moment pędu. Ma na nią również wpływ okres przechyłu statku. Efektywne instalacje okrętowe wymagają wirników o masie około 3% do 5% wyporności statku.
W przeciwieństwie do płetw hydrodynamicznych stabilizujących przechył, okrętowy stabilizator żyroskopowy może wytworzyć jedynie ograniczony moment stabilizujący przechył, który może zostać przekroczony wraz ze wzrostem wysokości fali. W przeciwnym razie, producent nierzadko zaleca, aby nie używać jednostki na morzu przy dużych falach.
.