Scheepsstabiliserende gyroscopen zijn een technologie die in de 19e eeuw en het begin van de 20e eeuw werd ontwikkeld en werd gebruikt om rolbewegingen in zeeschepen te stabiliseren. Hun functie is vergelijkbaar met gyroscopen met controlemoment of reactiewielen in ruimtevaartuigen – zij zorgen voor rotatiestabiliteit via de productie van koppel. Zij verloren in deze toepassing de voorkeur aan hydrodynamische rolstabilisatorvinnen vanwege de lagere kosten en het lagere gewicht. Sinds de jaren negentig is er echter hernieuwde belangstelling voor het apparaat voor rolstabilisatie bij lage snelheid van vaartuigen (Seakeeper, Quick MC2, enz.). In tegenstelling tot traditionele vinnen is de gyroscoop niet afhankelijk van de voorwaartse snelheid van het schip om een rolstabiliserend moment te genereren en kan hij dus motorjachten stabiliseren terwijl ze voor anker liggen. De laatste generatie stabilisatoren met “nulsnelheid” (CMC, Humphree, enz.) kan echter jachten stabiliseren terwijl ze voor anker liggen, dankzij hun excentriciteit ten opzichte van de as.
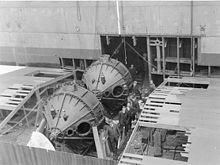
Het transportschip USS Henderson uit de Eerste Wereldoorlog, voltooid in 1917, was het eerste grote schip met gyrostabilisatoren. Het had twee vliegwielen van 25 ton en een diameter van 2,7 m die in de buurt van het midden van het schip waren gemonteerd, aangedreven door wisselstroommotoren van 75 pk (56 kW) bij 1100 omwentelingen per minuut. De behuizing van de gyroscopen was op verticale lagers gemonteerd. Wanneer een kleine sensor-gyroscoop op de brug een rolbeweging waarnam, draaide een servomotor de gyroscopen om een verticale as in een richting zodat hun precessie de rolbeweging zou tegengaan. In tests was dit systeem in staat om het rollen te verminderen tot 3 graden in de ruwste zeeën.
Een van de beroemdste schepen die voor het eerst een anti-rolling gyro gebruikte was het Italiaanse passagiersschip SS Conte di Savoia, dat voor het eerst voer in november 1932. Het had drie vliegwielen met een diameter van 13 voet en een gewicht van 108 ton.
De gyroscopische stabilisator van een schip werkt gewoonlijk door de rolas van de gyroscoop in te perken en hem toe te staan te “precessen”, hetzij in de steek- of de gieras. Door de gyroscoop te laten precesseren als het schip rolt, genereert de draaiende rotor een tegenwerkend rolstabiliserend moment ten opzichte van het moment dat door de golven op de scheepsromp wordt gegenereerd. Het vermogen om dit effectief te doen is afhankelijk van een reeks factoren, waaronder de grootte, het gewicht en het impulsmoment. Het wordt ook beïnvloed door de rolperiode van het schip. Effectieve scheepsinstallaties vereisen rotors met een gewicht van ongeveer 3% tot 5% van de waterverplaatsing van een schip.
In tegenstelling tot hydrodynamische rolstabiliserende vinnen, kan de gyroscopische stabilisator van het schip slechts een beperkt rolstabiliserend moment produceren dat kan worden overschreden naarmate de golfhoogte toeneemt. Anders is het niet ongebruikelijk dat de fabrikant aanbeveelt het apparaat niet op zee te gebruiken bij grote golven.