Skibsstabiliserende gyroskoper er en teknologi, der blev udviklet i det 19. århundrede og begyndelsen af det 20. århundrede og anvendt til at stabilisere rullebevægelser i søgående skibe. Deres funktion svarer til kontrolmomentgyroskoper eller reaktionshjul i rumfartøjer – de giver rotationsstabilitet via produktion af drejningsmoment. De tabte i denne anvendelse til fordel for hydrodynamiske rullestabilisatorfinner på grund af lavere omkostninger og lavere vægt. Siden 1990’erne har der imidlertid været fornyet interesse for anordningen til rullestabilisering af fartøjer ved lave hastigheder (Seakeeper, Quick MC2 osv.). I modsætning til traditionelle finner er gyroskopet ikke afhængig af skibets fremadgående hastighed for at generere et rullestabiliserende moment, og det kan derfor stabilisere motoryachter, mens de ligger for anker. Den seneste generation af stabilisatorer med “nul-hastighedsfinner” (CMC, Humphree osv.) kan imidlertid stabilisere lystbåde, mens de ligger for anker, takket være deres excentricitet i forhold til akslen.
Transportskibet USS Henderson fra Første Verdenskrig, der blev færdiggjort i 1917, var det første store skib med gyrostabilisatorer. Det havde to 25-tons svinghjul med en diameter på 2,7 m (9 fod) monteret nær midten af skibet, der blev drejet med 1100 omdrejninger pr. minut af vekselstrømsmotorer på 75 hk (56 kW). Gyroskopernes kabinetter var monteret på lodrette lejer. Når et lille sensorgyroskop på broen registrerede en rulning, drejede en servomotor gyroskoperne om en lodret akse i en retning, så deres præcession modvirkede rulningen. Ved forsøg var dette system i stand til at reducere rulningen til 3 grader i den hårdeste sø.
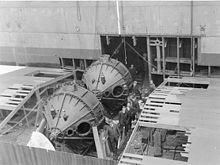
Et af de mest berømte skibe, der først anvendte et anti-rulningsgyroskop, var det italienske passagerlinjeskib SS Conte di Savoia, som sejlede første gang i november 1932. Det havde tre svinghjul, der var 13 fod i diameter og vejede 108 tons.
Skibets gyroskopiske stabilisator fungerer typisk ved at begrænse gyroskopets rulleakse og tillade det at “precessere” enten i pitch- eller yaw-aksen. Ved at tillade det at forcere, når skibet ruller, genererer dets roterende rotor et modvirkende rulningsstabiliserende moment i forhold til det moment, der genereres af bølgerne på skibets skrog. Dens evne til at gøre dette effektivt afhænger af en række faktorer, herunder dens størrelse, vægt og vinkelmoment. Den påvirkes også af skibets rulleperiode. Effektive skibsinstallationer kræver rotorer med en vægt på ca. 3% til 5% af et skibs deplacement.
I modsætning til hydrodynamiske rullestabiliseringsfinner kan skibets gyroskopiske stabilisator kun producere et begrænset rullestabiliseringsmoment, som kan overskrides, når bølgehøjden øges. Ellers er det ikke usædvanligt, at producenten anbefaler, at enheden ikke anvendes på havet i store bølger.