Skeppsstabiliserande gyroskop är en teknik som utvecklades under 1800-talet och början av 1900-talet och som används för att stabilisera rullningsrörelser i oceangående fartyg. Deras funktion liknar styrmomentgyroskop eller reaktionshjul i rymdfarkoster – de ger rotationsstabilitet genom produktion av vridmoment. De förlorade i denna tillämpning till förmån för hydrodynamiska rullstabilisatorfenor på grund av lägre kostnad och vikt. Sedan 1990-talet finns det dock ett förnyat intresse för anordningen för rullstabilisering av fartyg i låg hastighet (Seakeeper, Quick MC2 osv.). Till skillnad från traditionella fenor är gyroskopet inte beroende av fartygets framåtgående hastighet för att generera ett rullstabiliserande moment och kan därför stabilisera motoryachter när de ligger för ankar. Den senaste generationen av stabilisatorer med fenor med ”nollfart” (CMC, Humphree osv.) kan dock stabilisera båtar när de ligger för ankar tack vare sin excentricitet i förhållande till axeln.
Transportfartyget USS Henderson från första världskriget, som färdigställdes 1917, var det första stora fartyget med gyrostabilisatorer. Det hade två 25-tons svänghjul med en diameter på 2,7 m (9 fot) som var monterade nära fartygets mitt och som snurrade med 1100 varv per minut med hjälp av växelströmsmotorer på 75 hk (56 kW). Gyroskopernas höljen var monterade på vertikala lager. När ett litet sensorgyroskop på bryggan kände av en rullning, roterade en servomotor gyroskopen runt en vertikal axel i en riktning så att deras precession motverkade rullningen. I tester kunde detta system minska rullningen till 3 grader i de hårdaste sjöar.
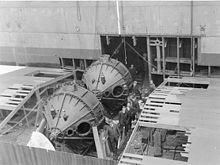
Ett av de mest kända fartygen som först använde en antirullningsgyro var det italienska passagerarfartyget SS Conte di Savoia, som seglade för första gången i november 1932. Det hade tre svänghjul som var 13 fot i diameter och vägde 108 ton.
Skeppets gyroskopiska stabilisator fungerar vanligtvis genom att begränsa gyroskopets rullaxel och låta det ”precessera” antingen i pitch- eller yaw-axeln. Genom att låta det precessera när fartyget rullar får dess snurrande rotor att generera ett motverkande rulstabiliserande moment till det som genereras av vågorna på fartygsskrovet. Dess förmåga att göra detta på ett effektivt sätt beror på en rad faktorer som inkluderar dess storlek, vikt och vridmoment. Den påverkas också av fartygets rullperiod. Effektiva fartygsinstallationer kräver rotorer med en vikt på cirka 3 % till 5 % av fartygets deplacement.
I motsats till hydrodynamiska rulstabiliserande fenor kan fartygets gyroskopiska stabilisator endast producera ett begränsat rulstabiliserande moment som kan överskridas när våghöjden ökar. Annars är det inte ovanligt att tillverkaren rekommenderar att enheten inte används till sjöss i stora vågor.